

There is a constant upward trend of development and progress in today’s world of electronics. Especially when it comes to the field of advanced robotics. Almost every robotic/autonomous setup requires some measure of speed and directional control to be associated with it so that it can at least be operatable, and this is where the problem lies. Most autonomous configurations use microprocessors that operate on a low voltage signal in the range of 3.3V – 5V, whereas the most common DC motor requires an operating voltage of 12V. Here, a DC motor driver comes into play. A motor driver is an integrated current amplifier circuit that is capable of acting as a bridge between the controller and the DC motor in a motor drive. So in today’s tutorial, we are going to go over a step by step procedure on How To Make An H-Bridge Motor Driver Circuit Using L293D IC.
What is an H-Bridge Motor Driver Circuit?
An H-Bridge motor driver circuit is the most common way of driving a brushed DC motor. It requires two transistor pairs to control the direction in which the current is allowed to flow through the DC Motor. By changing the direction of the current flow (reversing the voltage across the terminals of the motor), the rotational direction of the motor will change.
The heart of this circuit is an L293D IC. L293D is a 16-Pin Motor Driver IC. The IC works on the principle of a half bridge driver circuit. It is generally used for driving DC motors, stepper motors, and relay driver modules. This driver IC is capable of driving two motors at the same time and also provides independent directional control for each connected motor.
Hardware Components
You will need the following parts to build this project:
| S.No | Components | Value | Qty |
|---|---|---|---|
| 1) | DC Motors | 24V, 1000rpm | 2 |
| 2) | Motor Driver IC | L293D | 1 |
| 3) | Voltage Regulator IC | LM7805 | 1 |
| 4) | Capacitors | 100uF/25V, 0.01uF | 2 |
| 5) | IC Socket | 16-pin | 1 |
| 6) | Terminal block connecters | 2 & 3 pin | 3 |
| 7) | Header Pins | Male | 8 |
| 8) | Soldering Iron | 45W – 65W | 1 |
| 9) | Soldering Wire with flux | – | 1 |
| 10) | Veroboard | – | 1 |
| 11) | DC Battery | 3.7V | 1 |
| 12) | Battery Case | – | 1 |
| 13) | Jumper Wires | – | As per need |
L293D Pinout
Useful Steps
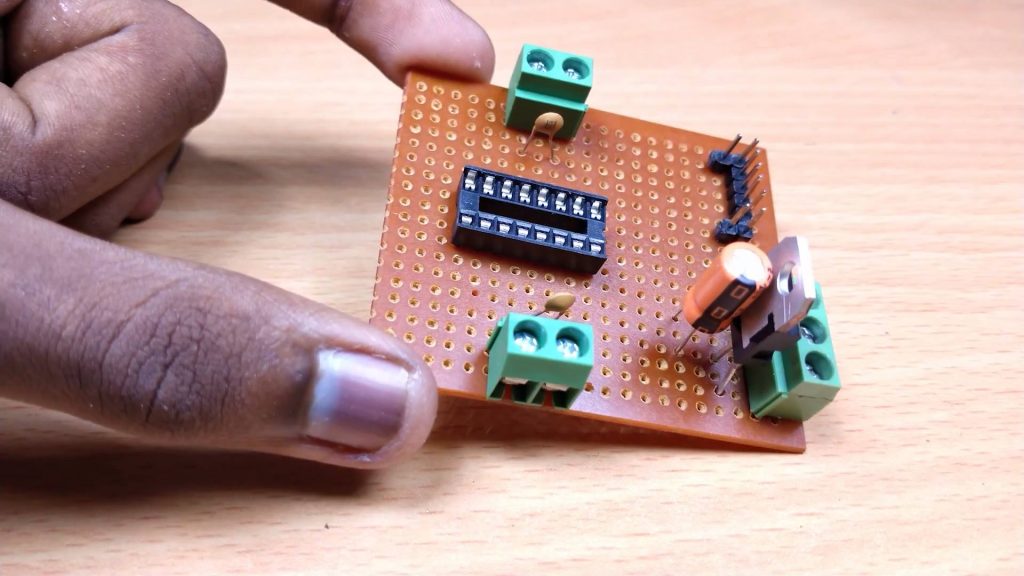
1) Solder a 3-pin terminal block connector on the veroboard. After that, solder the pins of the terminal block connector with the terminals of a LM7805 IC.

2) After that solder the -ve & +ve terminals of the 100uf/10V capacitor between the GND & Vout terminals of the LM7805 IC respectively.

3) Solder eight male headers on the veroboard.

4) Solder the 16 pin IC socket on the veroboard. After that, Solder the remaining terminal block connectors on the veroboard.

5) After that, solder the two 0.01uF capacitors between pin 3, 5 & pin 11, 14 of the IC. Also, solder the two capacitors with the +ve & -ve terminal of the two output block connectors.
6) Now, solder the four GND pins of the L293D IC with each other. After that, solder them with GND of the supply.

7) After that, solder the Vcc1 terminal of the IC with Vout terminal of the LM7805 regulator and Vcc2 terminal of the IC with 12V input terminal.

8) Solder the Enable 1,2 & Enable 3,4 (Active High) terminals with the 1st and 8th male header pins respectively.

9) Solder input pin 1, 2, 3, 4 with the input male header terminals of the circuit.

10) Short the enable pin male headers with the 5V supply headers using header short jumpers.

11) Connect the +ve and -ve terminals of the DC motors with the output block connecters.

12) Power up & test the circuit using a 7V – 12V power supply.

Circuit Diagram For H-Bridge Motor Driver
Working Explanation
This motor driver is capable of controlling two DC motors simultaneously and is also capable of providing independent control for each motor as well. The entire configuration of this circuit is based on the working of the H-Bridge circuit. On powering up the circuit and connecting the enable 1,2 with the supply of the circuit the H-bridge configuration for the first motor becomes activated & the motor starts to rotate.
Similarly, On connecting the enable 3,4 with the supply of the circuit the H-bridge configuration for the first motor becomes activated & the motor starts to rotate.
Applications
- Used for driving motors in devices such as LFRs, SCARA systems, etc.
- Also used in controlling various drones used in applications such as surveillance of property & terrain navigation.
See Also: Automatic Water Level Controller

